March 31st, 2024
The official website describes the March March March as “a long, flat, pointless walk across the Fens from the town of March to Cambridge, a distance of about thirty miles”. With a description like that I simply had to experience it. Except I did it in the reverse direction from Cambridge to March.

A flat field and a flat, wet path
It certainly was long (33.9 miles) and very flat. And arguably quite pointless.
There was almost nothing of interest along that route except that end of the the Hundred Foot Drain, which I failed to get an adequate photo of.

Yet another perfectly flat field
February 29th, 2024
A few weeks ago we had a “day of care” and it was one of the very rare dry days this winter so I set off towards the nearby town of Huntingdon.
For me at least I only know about Huntingdon because of the company Huntingdon Life Sciences which was targeted by animal rights extremists for many years. But apparently it was also the birthplace of Oliver Cromwell, so there you go.

American cemetery
On the way I passed through the American cemetery at Madingley. Jazz musician Glen Miller has a memorial here, along with thousands of other Americans who died in the second world war.

Wind farm at sunset
Predictably I underestimated the distance again and walked the last hour in darkness.
January 26th, 2024
A long and rather featureless walk through the bleak fens last weekend. There was no one else around. It was cold, and rained slightly.

The black soil here is quite typical of the fenland: it’s actually some of England’s most fertile soil. A result of the drainage several hundred years ago.
December 10th, 2023
The days are short and cold and strangely misty so I went for a less ambitious walk this week from Thetford to nearby Brandon.
Between the two is the aptly named Thetford Forest. An enormous man-made forest planted after the first world war to replenish Britain’s stock of trees. There is something quite regular about the rows of trees.

When I got to Brandon they were having some sort of Christmas fête to which the ever-present mist gave a somewhat gloomy and mysterious atmosphere.

The train back was one of two trains per day scheduled to call at Shippea Hill which was once Britain’s least-used station until its notoriety led to an increase in passengers (no one got on or off today).
December 9th, 2023
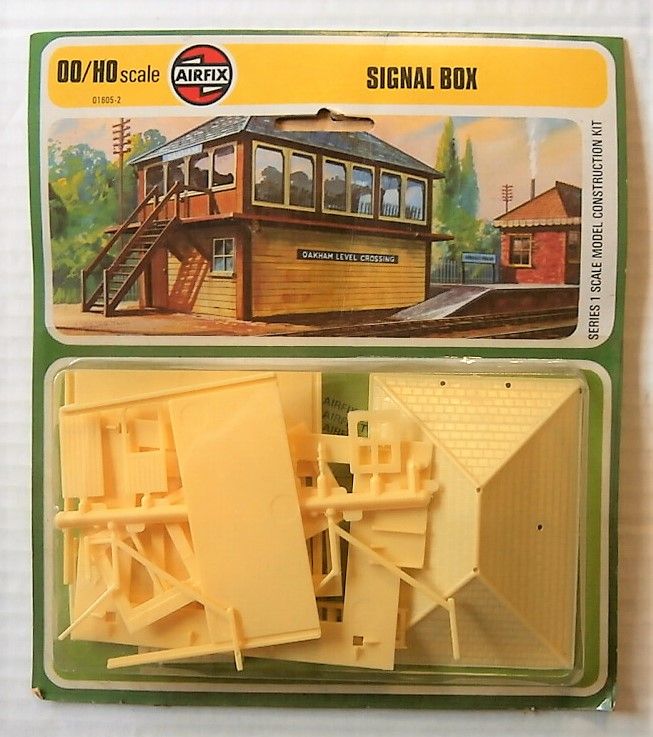
Last time when I stopped in Oakham I forgot to mention one of its most famous attractions: Oakham signal box which was used as the template for an Airfix model.

Oakham signal box
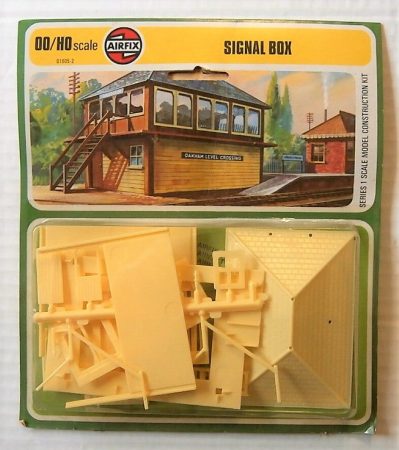
And here’s the model of it
Oakham has one other attraction which is the “castle” you can see in the photos below. (It’s not really a castle, it’s a “hall” at best.)
From Oakham I walked on to Melton Mowbray. My first visit to Leicestershire and I was pleasantly surprised! Lots of rolling hills and even the remains of this iron age fort at Burrough Hill.

Hill fort on Burrough Hill
Melton Mowbray is of course famous for its PIES (and Stilton cheese apparently) so I had to sample one and very tasty it was too.

A Melton Mowbray pork pie from Melton Mowbray
December 6th, 2023
This is a major new release with much improved support for VHDL-2019. Consult the features page for the current status of each LCS. This release also brings full support for cocotb!
Download: nvc-1.11.0.tar.gz
This release is signed with my PGP key ID 74319F1A: nvc-1.11.0.tar.gz.sig
- New command
--cover-export exports coverage data in the Cobertura XML format which is supported by most CI environments such as GitLab.
- Generics on internal instances can now be overridden with the
-g elaboration option. For example -g uut.value=42.
- Implemented the
'reflect attribute and associated protected types from VHDL-2019.
- Added support for VHDL-2019 sequential block statements.
- Implemented the VHDL-2019 directory I/O functions in
std.env.
- Added VHDL-2019 assert API (with @Blebowski).
- Implemented
'image, 'value and to_string for composite types in VHDL-2019.
- Implemented the “closely related record types” feature from VHDL-2019.
- Implemented the “composition with protected types” feature from VHDL-2019.
- The new
--shuffle option runs processes in a random order which can help to identify code that depends on a particular execution order.
- Updated to OSVVM 2023.07 for
nvc --install.
- Various enhancements and fixes to the VHPI implementation.
- Implemented the VHDL-2019 changes to
instance_name and path_name for protected type variables.
- VHPI error messages are no longer reported as diagnostic messages on the console. The new
--vhpi-debug option restores the old behaviour.
- Support for type conversions between arrays with closely related element types.
- Added support for FSM state coverage collection (from @Blebowski).
- An alias of a type now correctly creates implicit aliases for each predefined operator of that type (#776).
- Improve overload resolution where a partial named association implies the formal parameter must be an array (#793).
- Handling of implicit conversion for universal types has been reworked to better comply with the LRM.
- Fixed a crash when string literal characters have a type which is an alias to another type (#801).
- Added a warning when calling the predefined
"=" and "/=" operators on arrays and the left and right hand sides have different lengths.
- Expressions like
abs(x)**2.0 are now parsed correctly (#805).
Special thank you to @bpadalino, @tmeissner, @Blebowski, @amb5l, @m42uko, @a-panella, @nv-h for sponsoring me!
November 19th, 2023
Recently I’ve been following the Birmingham to Peterborough railway line (in the reverse direction) and the next stop is Oakham in Rutland, England’s smallest county!
Today’s walk traversed three counties! Lincolnshire, Northamptonshire, and Rutland. The latter two are firsts for doof.me.uk which is always exciting.

This is Rutland Water, England’s largest reservoir by surface area. It’s also man-made: that building was once the church of the village of Normanton which was flooded when the reservoir was constructed.
November 18th, 2023
Back on the road again and this time heading north-west from Peterborough.
Last time when I reached Peterborough it was already dark so I didn’t get to explore much. Here’s the cathedral.

Peterborough cathedral
The rest of city is a bit a of a dump to be honest. I wouldn’t recommend it.
From there I walked along the river Nene to Stamford in Lincolnshire which is altogether nicer.

River Nene
The town is very picturesque with all the buildings made out of local limestone (the picture below is from a second visit when I returned in the daytime). There’s also a lot of independent shops and restaurants. It seemed so nice in fact that I wondered why I’d never heard of it before. But it turns out I’m just ignorant as the Sunday Times voted it as the best place to live in the Midlands. Unfortunately that means the house prices are all outrageously high and locals can’t afford to live there any more.

Stamford
November 9th, 2023
Spotted in a holiday let my parents were staying in. Who asked for a touch-screen operated tap?? (The shower also had the same interface.)

October 27th, 2023
I’ve wanted to continue walking along the North Sea coast since my trip to Sheringham back in June but the next section was quite daunting as the nearest town accessible by public transport was Great Yarmouth about 33 miles away. However I plucked up some courage and stayed overnight in Cromer so I could get an earlier start and began the epic mission!
At 33.7 miles this was close to a doof.me.uk record, beaten only by my trek along Watership Down back in 2015.

Happisburgh lighthouse
The scenery wasn’t all that exciting: just miles and miles of sand dunes and sea wall. And I didn’t stop to look around much as I was trying to keep my average pace above 3mph.
















































































 Posts
Posts